一、 AGV总体结构
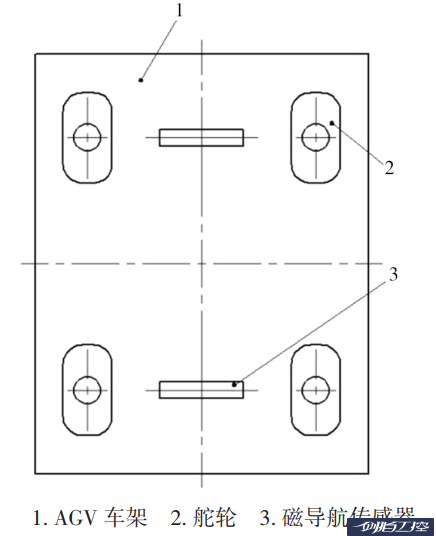
四舵轮结构形式是全向AGV常用的轮系结构,其总体结构采用四个舵轮结构,通过4个舵轮的转角及速度实现AGV的直行、平移、转向及避障等动作。四舵轮AGV总体结构如图1所示。
图1 四舵轮AGV总体结构
四舵轮分布:在此种情况下,AGV车体四角皆分布舵轮,可实现AGV的全方位任意半径运动,直接提高AGV的运载能力,但其运动模型复杂,运动控制算法难,成为了目前四舵轮机器人研究的热点。
查看更多
PLC
ICS
DCS
剑指工控公开课系列
S7-1200/.../DEMO Project S7-1200.ap10 S7-1200/.../Settings.xml S7-1200/.../PEData.idx S7-1200/.../Siemens.Automation.DomainModel.xml S7-1200/.../Main.xml S7-1200/.../PEData.plf